OCT
Note
This page is under active development.
This package homes the details for the OCT system. This package simulates an OCT imaging system of a blood vessel by using two lidar sensors.
Package Structure
oct_description
config
contains the rviz config file.
launch
contains the launch file to start the robot_state_publisher for the OCT system.
meshes
contains the mesh files required for the OCT packages.
urdf
contains the URDF files for the OCT system.
oct_gazebo
config
contains the the rviz config file.
launch
contains the launch file to start gazebo and rviz, adding the oct system.
worlds
contains the world files for gazebo.
oct_plugin
contains the gazebo plugin files for OCT sensor
Running the OCT
Build the packages
colcon buildsource install/setup.bashLaunch rviz and gazebo with the suture tool
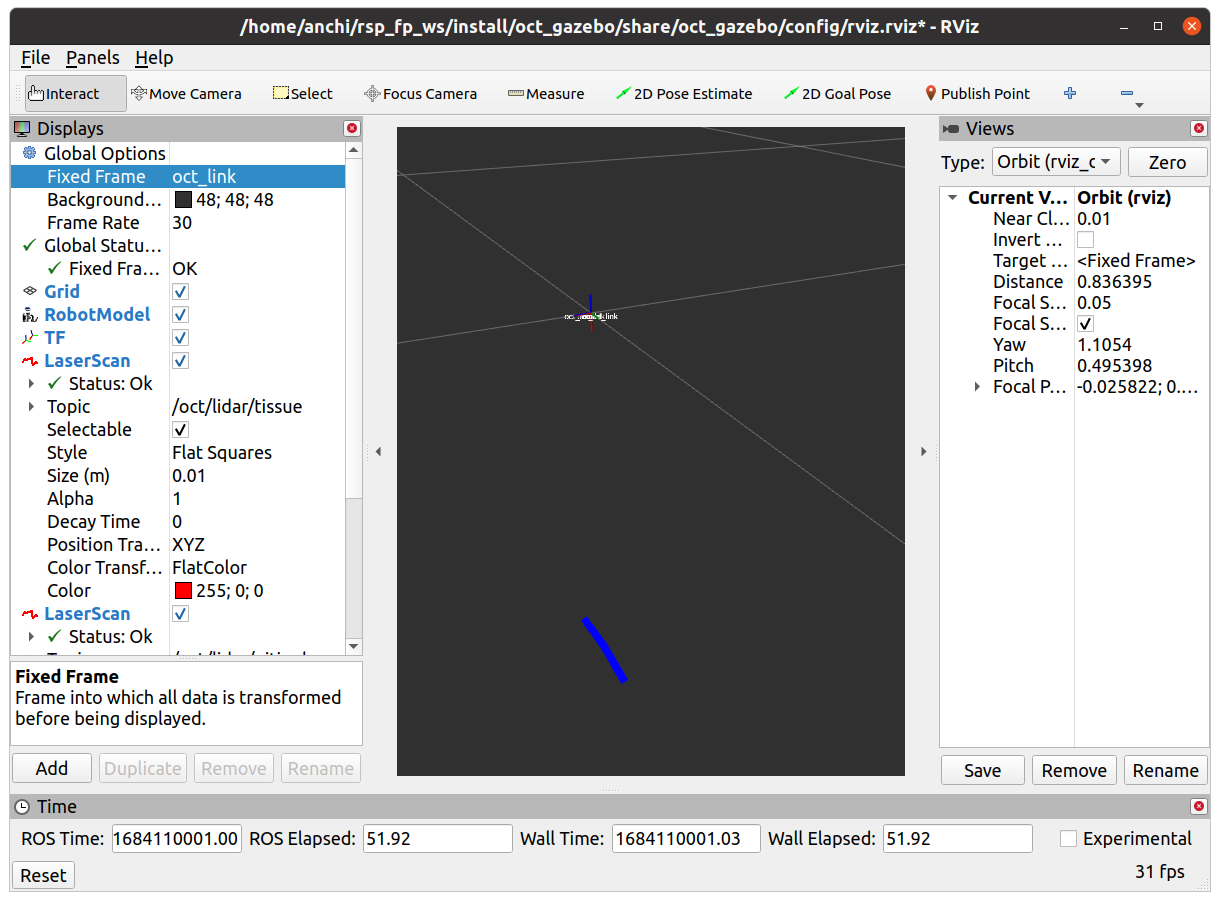
ros2 launch oct_gazebo oct.launch.xmlIn rviz, change the fixed frame from world to oct_link
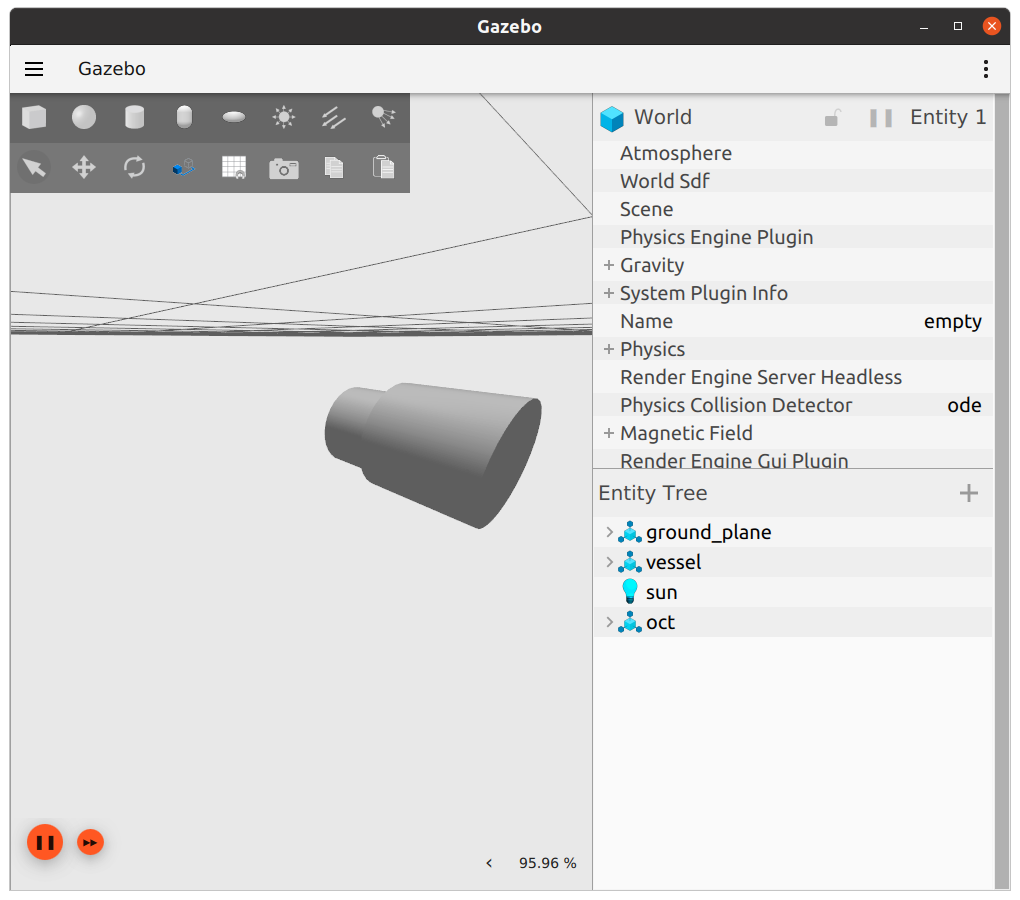
You should see the sensor output in rviz. The vessel in gazebo represents the blood vessel. Each lidar sensor responds to a different part of the vessel - one lidar responds to the smaller cylinder only, while the other response to the larger cylinder only. The size of the “vessel” is large simply for demonstration purposes. This is accomplished by using the visibility_mask available on lidar sensors in conjunction with the visibility_flags available on sdf models with visual elements. Lidar sensors derive from camera sensors and therefore have a visbility_maks even though it is not mentioned in the documentation. The visibility_mask will be bit-wise AND with each visual element’s visibility_flags. If the AND returns nonzero, then the visual is visible to the lidar sensor. For this project, the visibility_flags are set for tissue visual here and nitinol visual here. The visibility_masks are set for tissue lidar sensor here and nitinol lidar sensor here.
NOTE: it is currently not known how close in proximity the camera and sensor can be. This would be helpful to ascertain so as to determine if this method is suitable long-term for simulating the nitinol/tissue proximity to the OCT sensor.
The below shows an example output.
NOTE: the OCT in gazebo is very small, so you’ll need to zoom in above the “vessel” cylinders to see it.
If the “vessel” is moved along its z-axis in Gazebo, there will be either a set of red or blue laser scans in rviz below the OCT sensor (or both if its centered under the OCT sensor since the cylinders composing the “vessel” overlap some at the middle of the vessel). The laser scans in rviz are rendered from the data streamed on the oct_tissue and oct_nitinol ROS topics.
gazebo (showing simulates blood vessel) |
rviz |
|---|---|
|
|