Maps
Note
This page is under active development.
This package homes the details for maps.
Package Structure
maps_control
(future work) will contain the control files for the maps.
maps_description
launch
maps_bringup.launch: contains launch file to start the robot_state_publisher for the maps.
maps_double.launch: launches full maps system.
maps_double.launch: launch half maps system.
meshes
contains mesh files for the maps components.
urdf
contains the URDF files for the maps system.
rviz
contains the rviz config file.
maps_gazebo
launch
contains the launch file to start gazebo and rviz, adding the maps system.
maps_double_gazebo.launch.xml: launches the full maps system.
maps_single_gazebo.launch.xml: launches half the maps system.
worlds
contains world file for gazebo.
Running the Maps System
Build the packages
colcon buildsource install/setup.bashLaunch rviz with the maps system
ros2 launch maps_gazebo maps_double_gazebo.launch.xml
See below for example output.
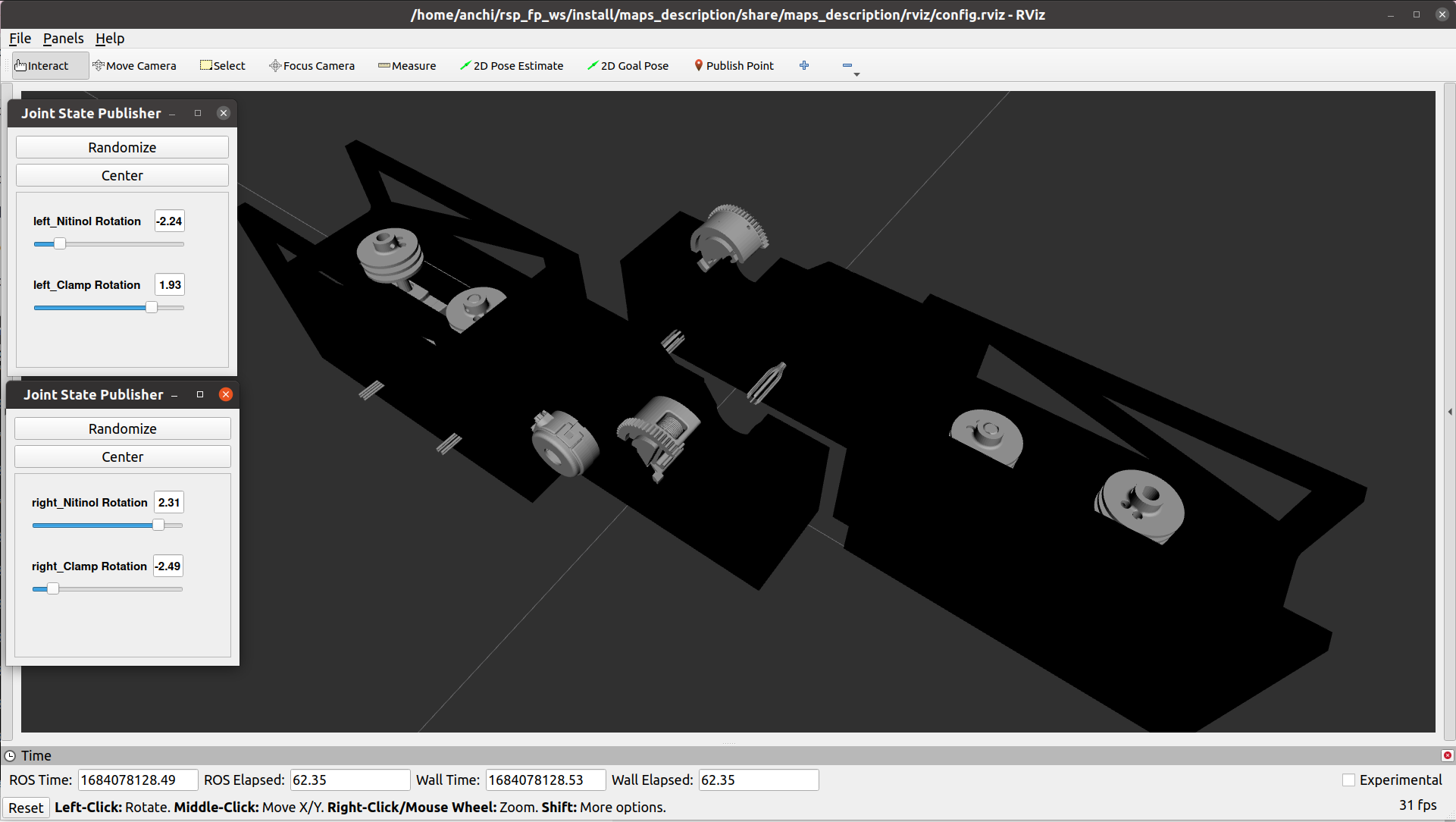
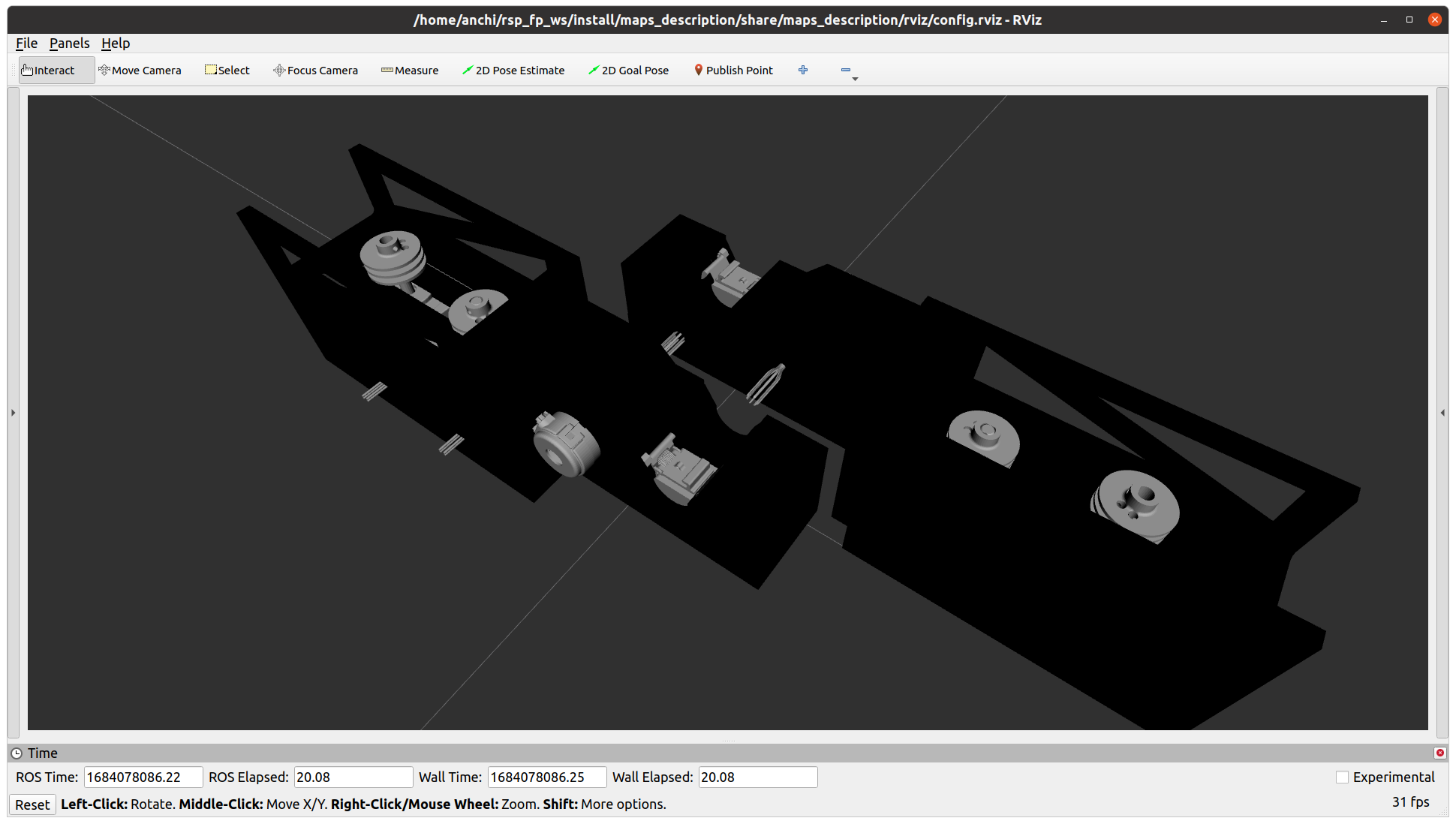
Rviz window after: ros2 launch maps_gazebo maps_double_gazebo.launch.xml
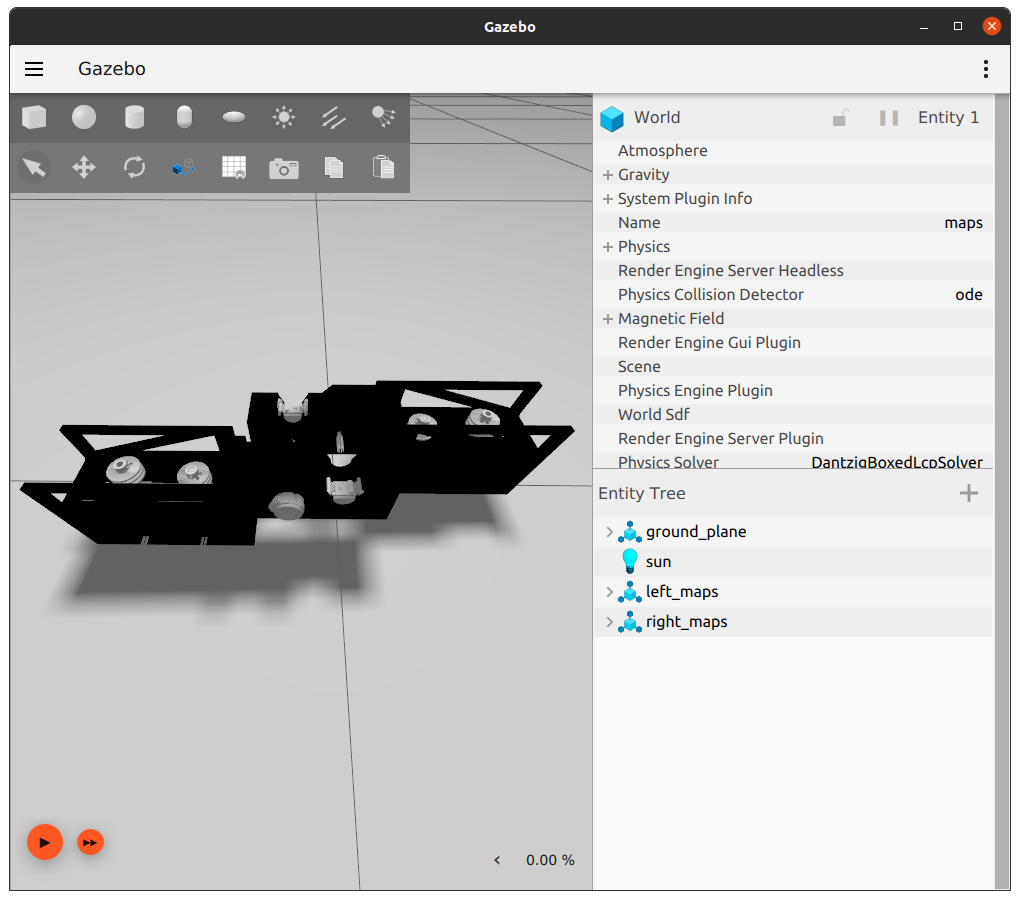
Gazebo window after: ros2 launch maps_gazebo maps_double_gazebo.launch.xml
It is possible to move the maps joints using the Joint State Publisher gui.